PENYELESAIAN ROBOT
Mulai Rabu besok 25 Mei sampau Sabtu 28 Mei Robot sudah siap di nilai. Ambil nilai di ruang Roman pada hari Senin, 30 Mei 2016. Kemampuan memasukan sampah kertas dalam waktu 10 menit.
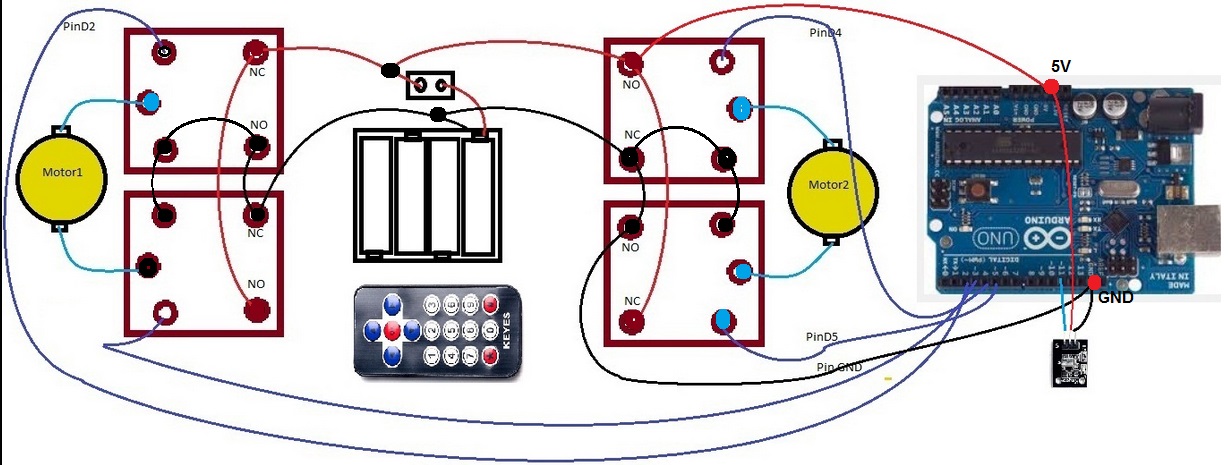
Kalian print gambar berikut, untuk bisa menghubungkan ke-4 relay dengan Arduino, Saklar dan Motor serta Baterai. Solderkan kabel sesuai warna di setiap kaki relay serta sambungan beberapa kabel sesuai warna, kalian bisa memilih salah satu skema yang ditiru. Skema 3 model pasang relay sistem robot.
Program lengkap dengan Remote Control kalian copy pada Tugas di Blog sebelumnya. Pastikan kalian sudah mendownload file "Remote Control Arduino" via google.com. File tersebut harus di instalkan atau masukan di lebery program Arduino
Skema pemasang relay, arduino dan motor Program Robot
Model1. Lengkap dengan Sensor Remote dan Arduino

Untuk mengetes robot tanpa Remote Control, masukkan program di bawah ke dalam Arduino
{
Serial.begin(9600);
pinMode(2,OUTPUT);
pinMode(3,OUTPUT);
pinMode(4,OUTPUT);
pinMode(5,OUTPUT);
}
void maju() {
digitalWrite(2,LOW);
digitalWrite(3,LOW);
digitalWrite(4,LOW);
digitalWrite(5,LOW);
}
void mundur(){
digitalWrite(2,HIGH);
digitalWrite(3,HIGH);
digitalWrite(4,HIGH);
digitalWrite(5,HIGH);
}
void belokanan(){
digitalWrite(2,LOW);
digitalWrite(3,LOW);
digitalWrite(4,HIGH);
digitalWrite(5,LOW);
}
void belokiri(){
digitalWrite(2,LOW);
digitalWrite(3,HIGH);
digitalWrite(4,LOW);
digitalWrite(5,LOW);
}
void diam(){
digitalWrite(2,LOW);
digitalWrite(3,HIGH);
digitalWrite(4,LOW);
digitalWrite(5,HIGH);
}
void loop() {
maju();
delay(2000);
diam();
delay(200);
diam();
delay(200);
mundur();
delay(2000);
diam();
delay(200);
diam();
delay(200);
belokanan();
delay(2000);
diam();
delay(200);
diam();
delay(200);
belokiri();
delay(2000);
diam();
delay200);
diam();
delay200);
}
KISI-KISI UKK
1. Menghitung usaha
dari benda
2. Menghitung gaya
3. Kecepatan setelah
tumbukan lenting sempurna
4. Tekanan hidros
statika dua bejana
5. Kecepatan air keluar
lobang tangki air dan jarak
6. Gaya tegang tali
sistem setimbang tongkat L di ikat di
7. Gaya Normal tongkat
datar sistem setimbang
8. Tekanan gas dalam
ruang
9. Efisiensi mesin
10. Titik berat bidang
11. Inersia 3 titik di
putar satu sumbu
12. Momen Inersia Torsi
katrol tarik tali
13. Air mengalir dari
pipa A ke pipa B
14. Suhu gas ideal dalam ruang tertutup
15. Usaha gas dalam ruang “ tetutup
16. Menaikan efisiensin
mesin
17. Resultan momen gaya
18. Torsi bidang di putar banyak gaya
19. Gaya angkat pesawat
20. Gaya gesekan bidang
sistem setimbang
21. Percepatan linier
dan gesekan bola meluncur
22. Koordinat titik berat bidang homogen
23. Nama siklus
polytropic dari Kurva PV
24. Usaha, kalor dan
perubahan energi dalam gas Monoatomic
TEMPAT RITES UH TORSI DIKELAS MASING-MASING
Kerjakan pula di kertas ulangan urut sesuai nomor urut yang keluar di monitor.

TEMPAT RITES UH TORSI DIKELAS MASING-MASING
Kerjakan pula di kertas ulangan urut sesuai nomor urut yang keluar di monitor.
Tidak ada komentar:
Posting Komentar